Camera housing collision
In eye-in-hand applications (camera mounted on the robot), working with deep boxes or containers can introduce a collision risk between the camera housing and the container walls during the approach motion. This is especially common when the robot needs to reach deep inside the box to pick parts.
To reduce this issue, you can use a 3D-printed extender that increases the distance between the gripper and the camera housing, providing additional clearance and reducing the chances of collisions.
This extender can also be used when using large or bulky grippers in eye-in-hand configurations, in case the gripper itself collides with the camera housing during assembly.
You can download the .STL file of the adapter here:
The ZIP file includes:
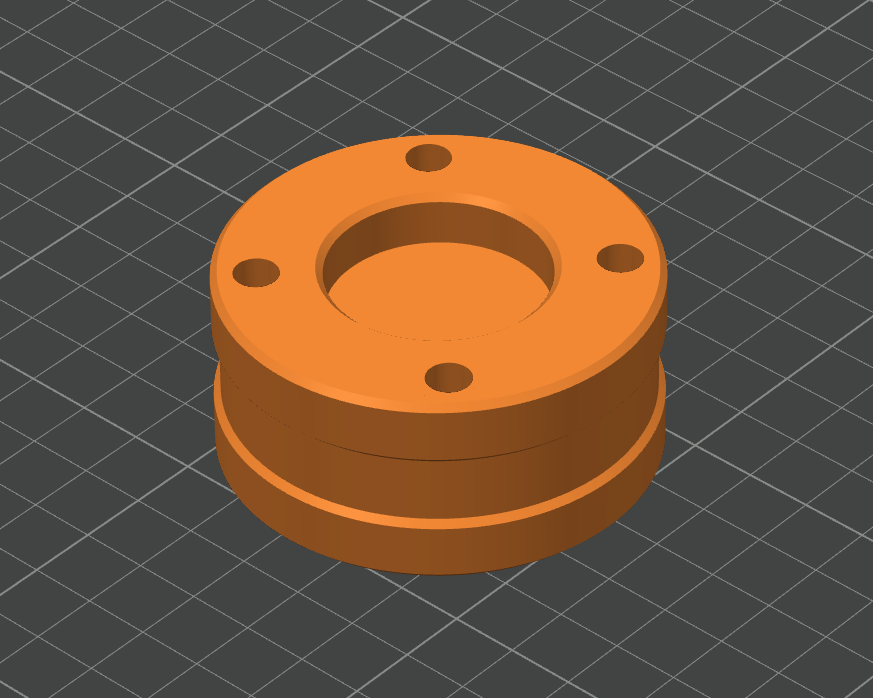
- The main extender (Gripper_extender.stl)
- An optional alignment pin (Gripper_extender_pin.stl), which can be glued to the bottom of the extender to help center it accurately on the camera housing during assembly
Important
After installing the extender, remember to update the robot TCP configuration. Increase the TCP Z offset by 30.0 mm
Recommended 3D printing settings¶
- Supports: YES
- Number of walls / Wall loops: 4
- Infill density: 40%
- Top/Bottom layers: 4