What is Pick[+]?
Pick[+] translates camera data into collision-free pick & place trajectories in seconds. It ships with:
- A server PC running the vision + planning engine.
- A cross‑platform client app used to configure hardware, scan objects and monitor execution.
- Ready‑made plugins that talk to your robot controller via Ethernet (UR, ABB, …).
The result: rapid deployment of both U-Pick (unseen items) and K-Pick (known items) applications without writing code.
-
01. APPROACH
The robot approaches the workspace to capture data
-

02. DATA CAPTURE
The 2D and 3D images of the objects are captured
-

03. SEGMENTATION
AI analyzes the image and segments each object to estimate its position, orientation and category
-
![Launch Pick[+]](/1.x/assets/1.x/general_assets/landing_page/phase4.png)
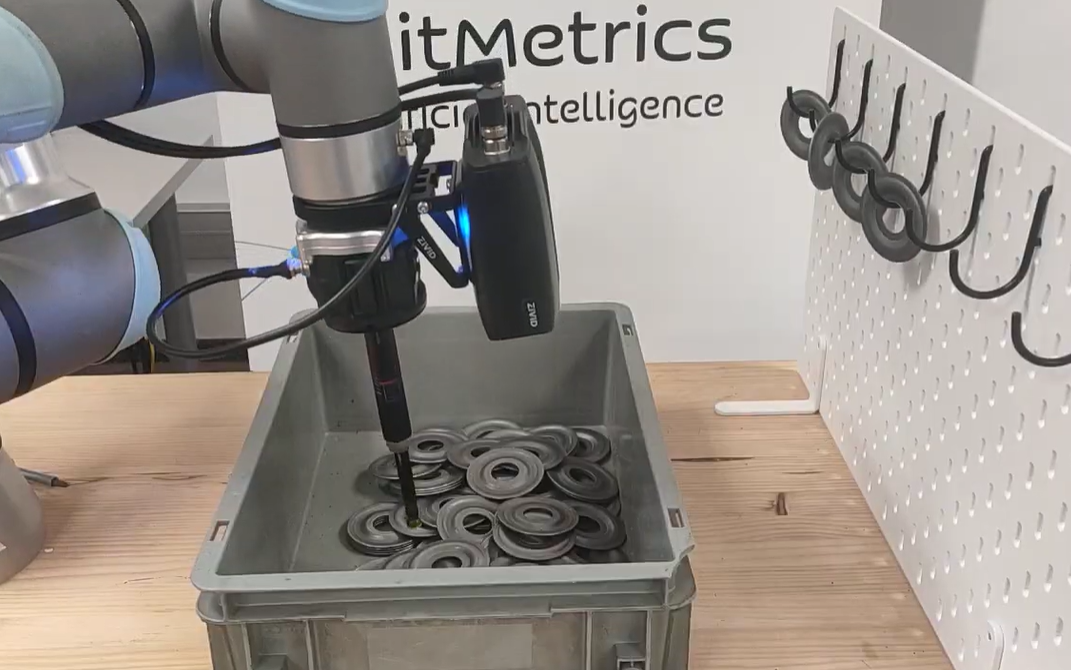
04. PICK
The system calculates the exact position for the robot to pick up the object